Liu Liu
所属机构. 博士生@上海交通大学.

这张照片拍摄于六年前,记录我还有头发时的样子.
E-Mail Address: robotics_qi ^AT sjtu.edu.cn
I am Qi Wu(吴奇- in Chinese, Pronounce), a member of the Paopao SLAM robot team, currently pursuing a Ph.D. degree at Shanghai Jiao Tong University, focusing on the research of SLAM algorithms that integrate various sensor technologies. I have a strong interest in combining new types of sensors (such as 360-degree cameras and millimeter-wave radar) and exploring implicit three-dimensional reconstruction algorithms like NeRF etc. My doctoral journey is under the guidance of Prof. Wenxian Yu and Prof. Ling Pei and meanwhile, I worked closely with Prof. Xieyuanli Chen. Previously, I obtained my master’s degree from Beijing University of Posts and Telecommunications, under the mentorship of Jiao Jichao and Deng Zhongliang; and I completed my undergraduate degree at Chongqing University of Posts and Telecommunications, guided by Professor Mu Zhou, who introduced me to localization researching area.
I hope my blog will be a valuable tool for any scholar or practitioner in the field of localization and mapping. I hope my blog can help researchers swiftly identify the shortcomings of each proposed technique, with the many new proposed systems appearing every day. If you have a great passion for these research areas or have expertise in related areas, I would love to have a connect with you. Please feel free to send me a email.
news
| 31 Jan 2024 | Our work has been accepted by the ICCV(International Conference on Computer Vision)(Co-First Author). ! |
|---|---|
| 15 Dec 2023 | Our work has been accepted by the TIE(Transactions on Industrial Electronics). ! |
| 16 Aug 2023 | Our work has been accepted by the CVPR(IEEE/CVF Conference on Computer Vision and Pattern Recognition). ! |
selected publications
-
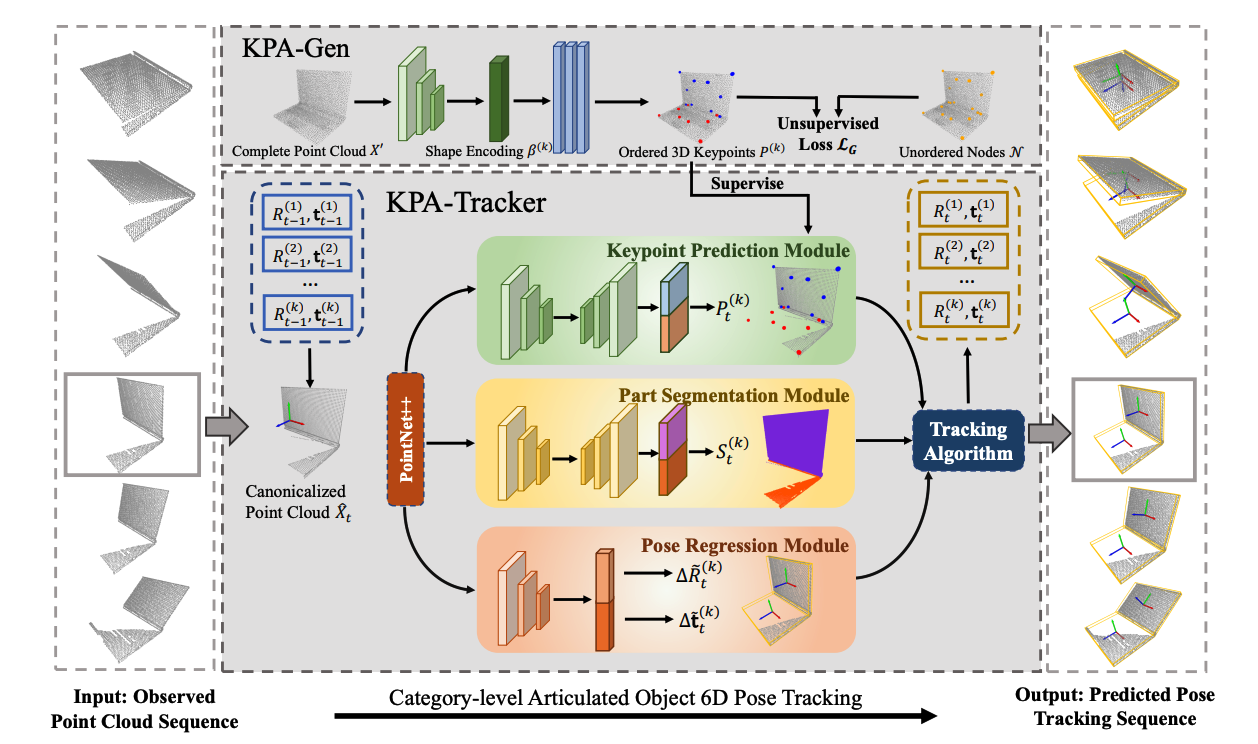 KPA-Tracker: Towards Robust and Real-Time Category-Level Articulated Object 6D Pose TrackingIn aaai , 2024
KPA-Tracker: Towards Robust and Real-Time Category-Level Articulated Object 6D Pose TrackingIn aaai , 2024 -
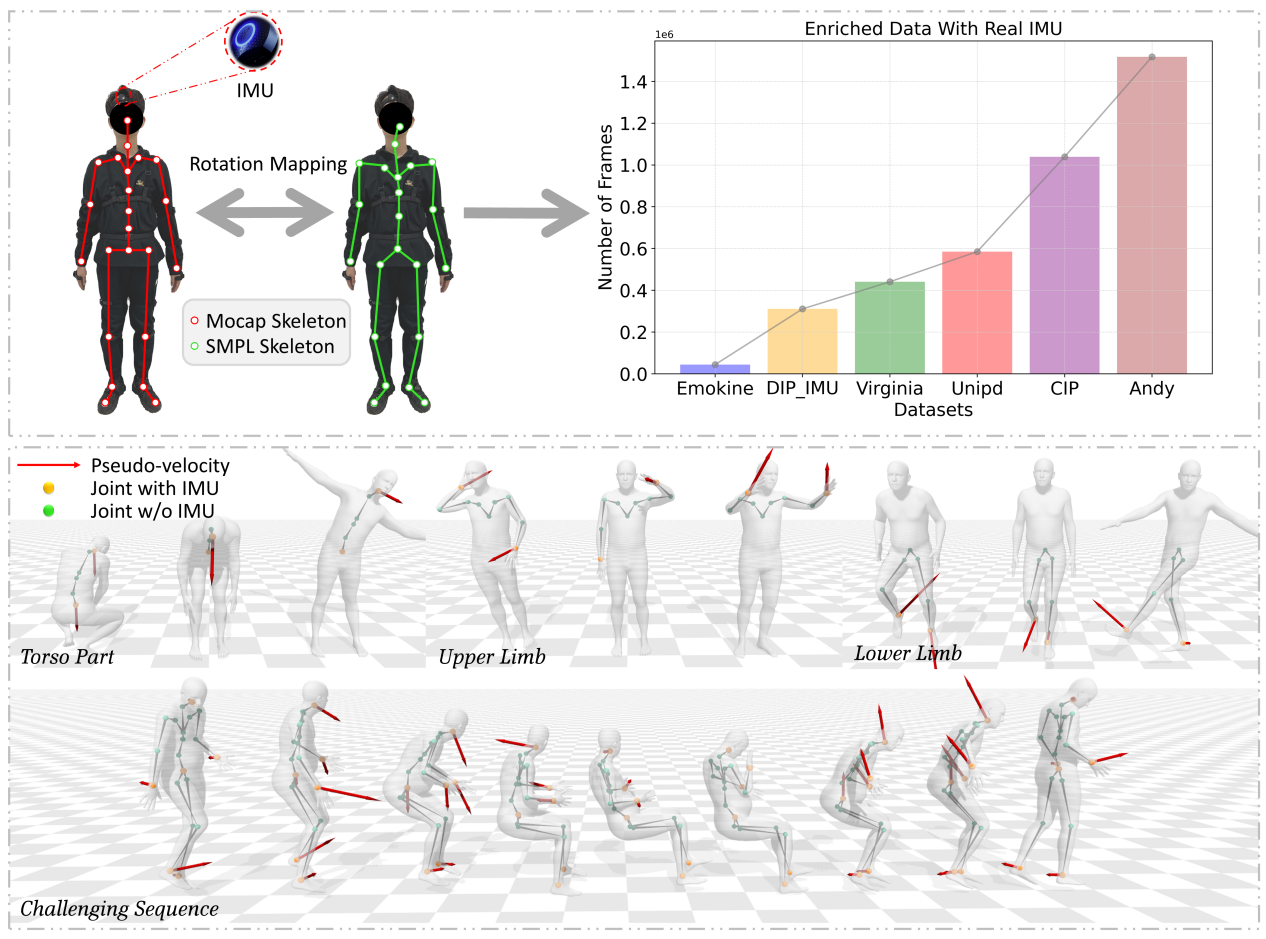 Dynamic Inertial Poser (DynaIP): Part-Based Motion Dynamics Learning for Enhanced Human Pose Estimation with Sparse Inertial SensorsIEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), 2024
Dynamic Inertial Poser (DynaIP): Part-Based Motion Dynamics Learning for Enhanced Human Pose Estimation with Sparse Inertial SensorsIEEE / CVF Computer Vision and Pattern Recognition Conference (CVPR), 2024 -
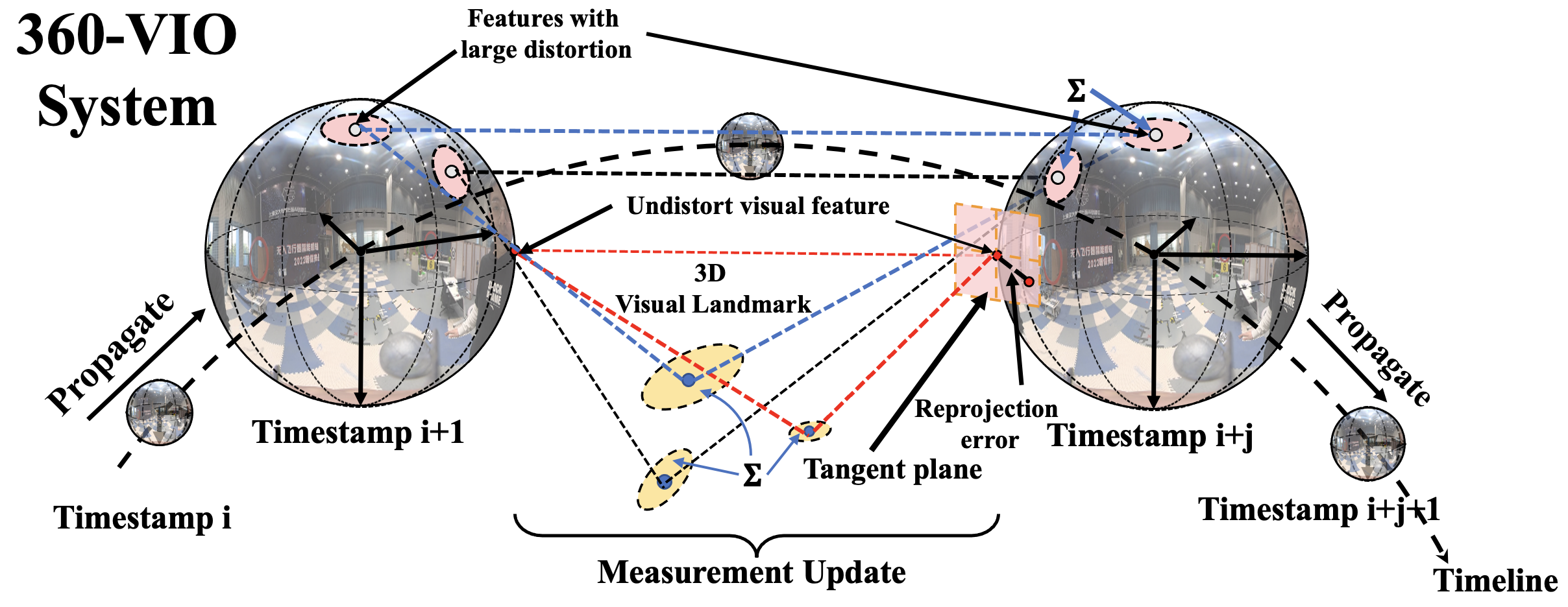 360-VIO: A Robust Visual–Inertial Odometry Using a 360° CameraIEEE Transactions on Industrial Electronics, 2023
360-VIO: A Robust Visual–Inertial Odometry Using a 360° CameraIEEE Transactions on Industrial Electronics, 2023 -
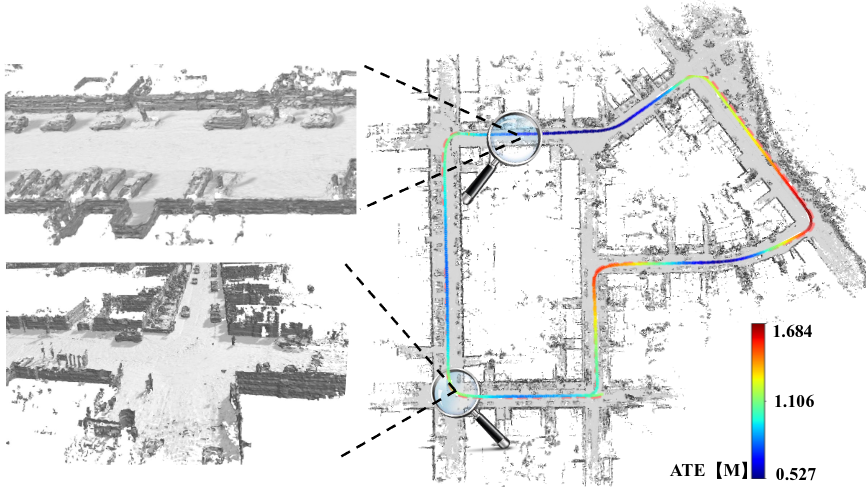 Nerf-loam: Neural implicit representation for large-scale incremental lidar odometry and mappingIn iccv , 2023
Nerf-loam: Neural implicit representation for large-scale incremental lidar odometry and mappingIn iccv , 2023


